2d convex hull
Compute the 2d convex hull of a point cloud in the plane.
Access methods
8 Toolbar:

8 Menu: ComputationalCAD 2d convex hull
7 Command entry: CC:HULL:2D
Dialog
Select points:
Select the points for which to compute the 2d convex
hull.
Specify projection direction
[X/Y/Z/Ucs/2Points]:
Select the
projection
direction.
<X>:
The hull is computed in the global
YZ-plane
<Y>:
The hull is computed in the global
XZ-plane.
<Z>:
The hull is computed in the global XY-plane
(default).
<Ucs>:
The hull is computed in the UCS
XY-plane.
<2Points>: The hull is computed in a
user defined plane perpendicular to the projection direction. The following
dialog occurs:
Specify first point
Select the first point of the normal vector defining the
plane.
Specify second point
Select the second point of the normal vector defining the plane.
Notes
The 2d convex hull is the planar convex polygon that encloses all points with minimum perimeter length. If the points are 3d points, the 2d convex hull is computed for the projection of these points onto the specified projection plane.
 Use Generate points on primitives and Generate points on solids to generate
input data.
Use Generate points on primitives and Generate points on solids to generate
input data.
Example
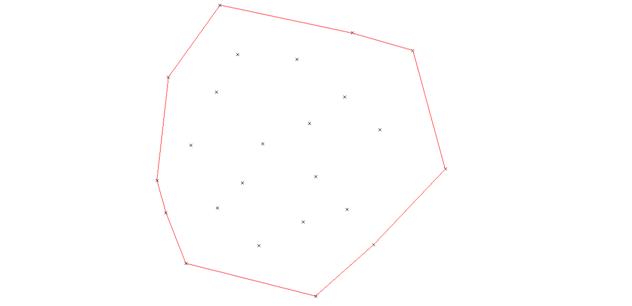
Figure 40: A 2d convex hull of 24 points
Command line prompt:
Number of vertices on hull : 10
Hull perimeter length : 2156.6425
Enclosed area in hull plane: 337976.7258